
|
Marine systems simulation
|
|
|
Marine systems simulation
|
 Collaboration diagram for Ship local connection:
Collaboration diagram for Ship local connection:The "LocalConnection" SimObject defines a body fixed point which travels and rotates with the parent body. The main application of a body fixed point is to measure the position, acceleration and velocities on a particular point on a rigid body, and to calculate provide position and velocity data for calculation of forces. The body fixed point can also be used to translate a force on a particular point to a force and torque pair which acts on the origin of the parent body.
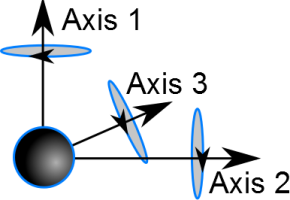
A Body fixed point defines a local coordinate system attached to the parent body. The initial orientation of the local coordinate system is a right handed system parallel to the axes of the parent body. The global orientation of the three axes can be obtained from the output and the relative orientation of the axes can be controlled form input ports. The rotation of the local coordinate system is defined as successive rotations about the first (x), second (y) and third axis (z).
| Name | Width | Description |
|---|---|---|
| ParentPositionNED | 3 |
The position of the parent body in north-east-down |
| ParentQuaternionNED | 3 |
The orientation quaternion of the parent body in north-east-down |
| ParentVelocityNED | 3 |
The linear velocities of the parent body in north-east-down |
| ParentOmegaNED | 4 |
The rotational speed of the parent body in north-east-down |
| ForceNED | 3 |
Translate an input force to force-torque pair around the parent origin |
| Name | Width | Description |
|---|---|---|
| PositionNED | 3 |
The position in north-east-down coordinates |
| VelocityNED | 3 |
The Linear velocity in north-east-down coordinates |
| VelocityBody | 3 |
The velocity in the parents local axis system |
| OmegaNED | 3 |
The rotational velocity in north-east-down coordinates |
| QuaternionNED | 4 |
The rotation quaternion. The orientation quaternion is the rotation of the parent body rotated by any axis rotations of the 1,2,3 axes, in succession |
| Axis1NED | 3 |
The normal vector of the 1. axis in north-east-down coordinates |
| Axis2NED | 3 |
The normal vector of the 2. axis in north-east-down coordinates |
| Axis3NED | 3 |
The normal vector of the 3. axis in north-east-down coordinates |
| ForceNED | 3 |
The force output in north-east-down coordinates |
| TorqueNED | 3 |
The torque output around the parent body origin of the force input in body coordinates |
| Name | Width | Description |
|---|---|---|
| Offset | 3 |
The offset in the parents axis system |
| ForceCalculator | 1 |
Use the object to translate forces to force-torque pairs |
| ForceInBodyFrame | 1 |
Set the input force in the parents body frame |