Many tools exist to simulate dynamic systems in the time domain, with different focus and usage areas. FhSim focus on simulation performance and marine systems modelling. Models are most often developed in C++. An optional, integrated 3D visualisation facilitates model development and presentation purposes.
Features
Fast Development
FhSim provides a common simulation environment in which models can be shared and combined in many different ways. This facilitates re-use, preserves project results, and cuts down on model development costs.
Extensive Model Library
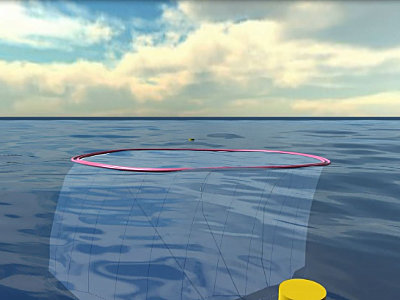
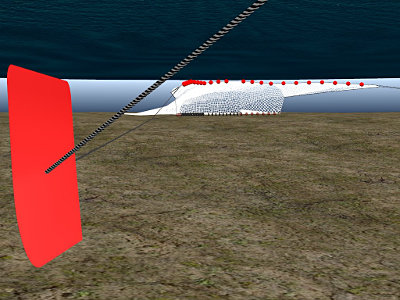
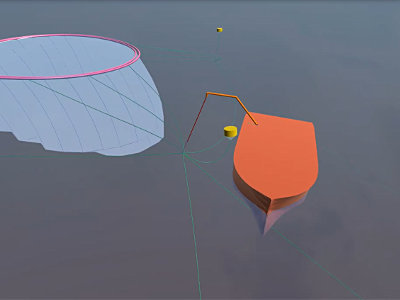
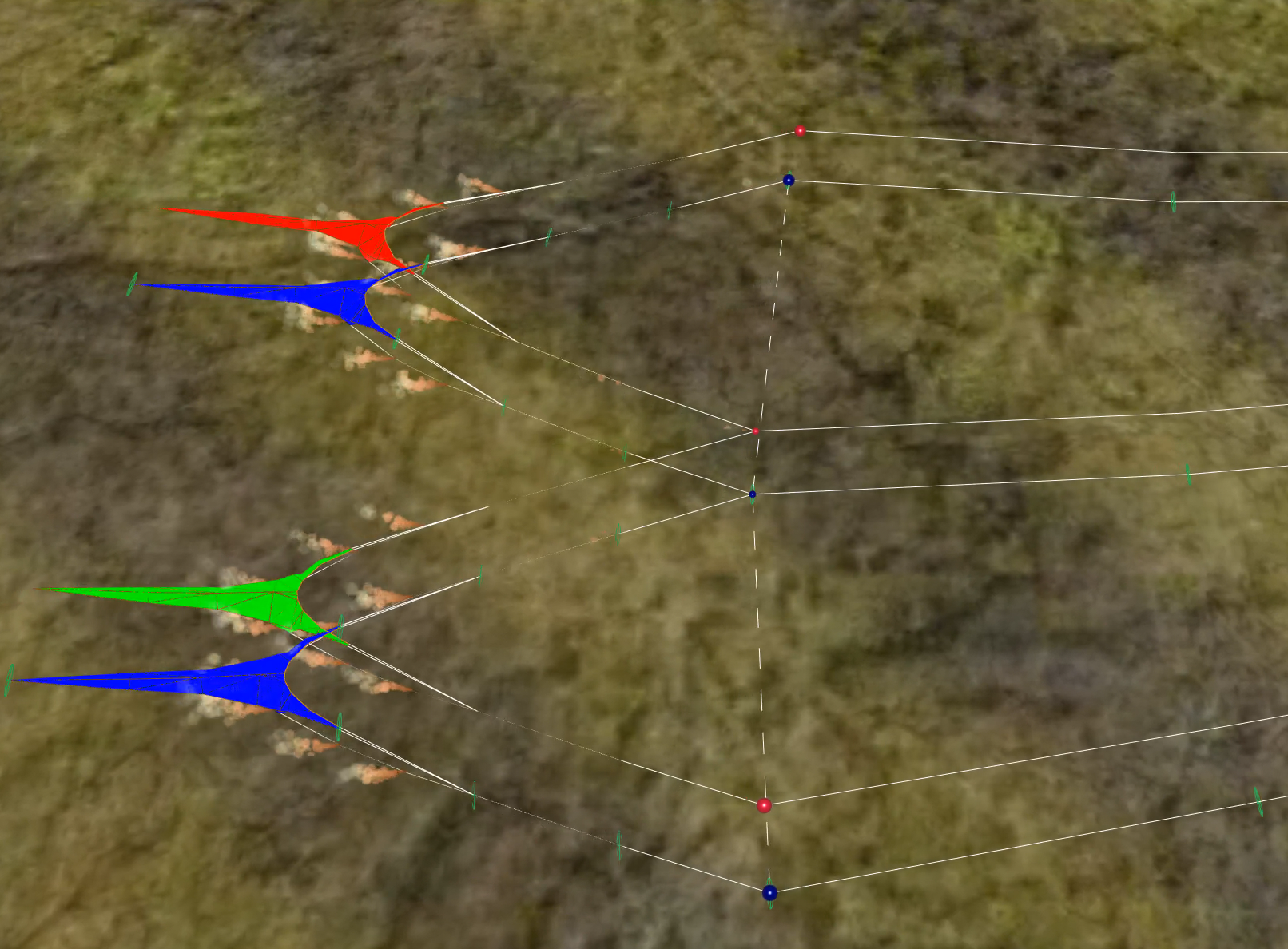
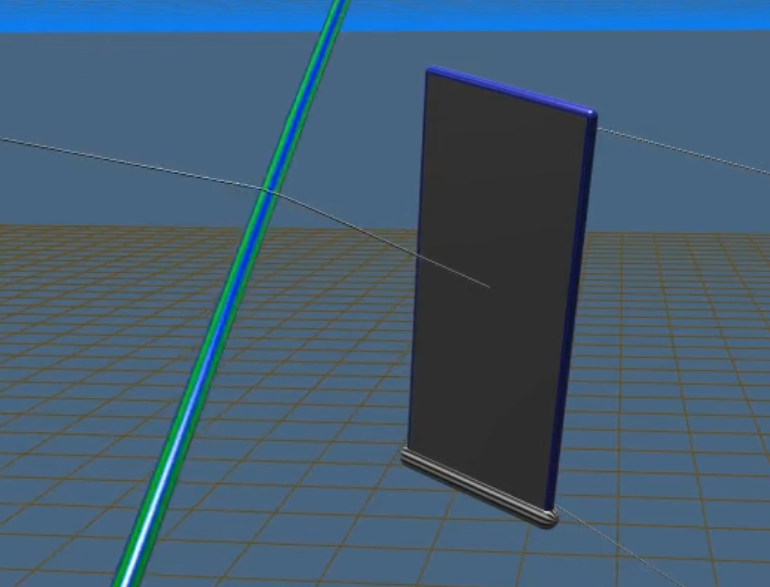
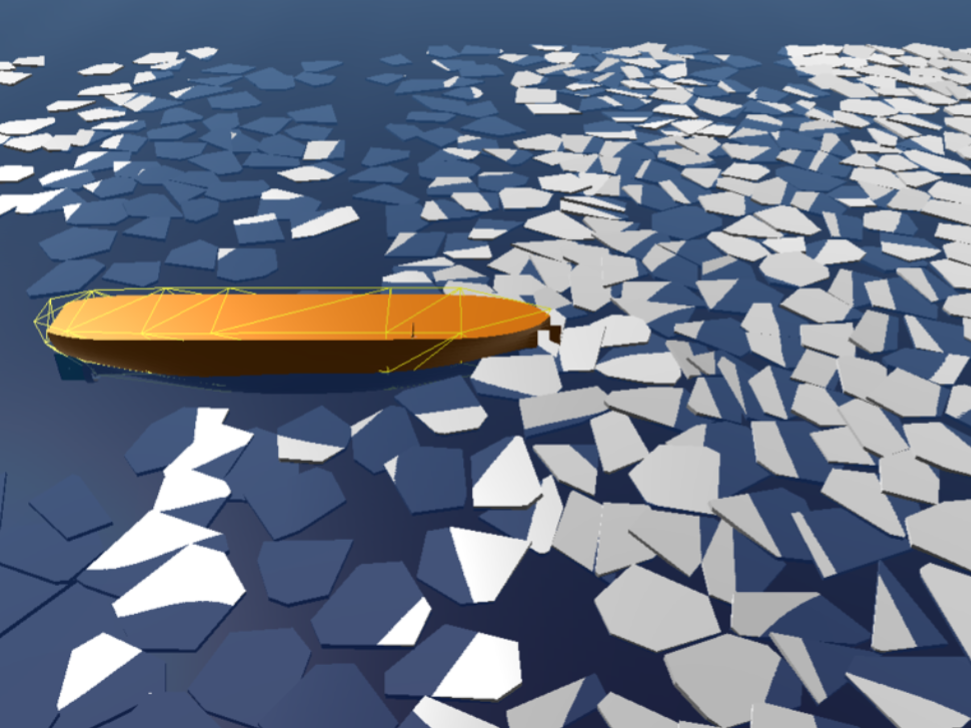
FhSim features a large collection of mathematical models, including ships, trawl nets and doors, net cages, ropes and weight systems, buoys, cables, winches, and anchors.
Flexibility
FhSim can be run on Windows and Linux, as a stand-alone or as an API. It can be coupled with MATLAB/Simulink, and executed via Java (JNI).
High Realism
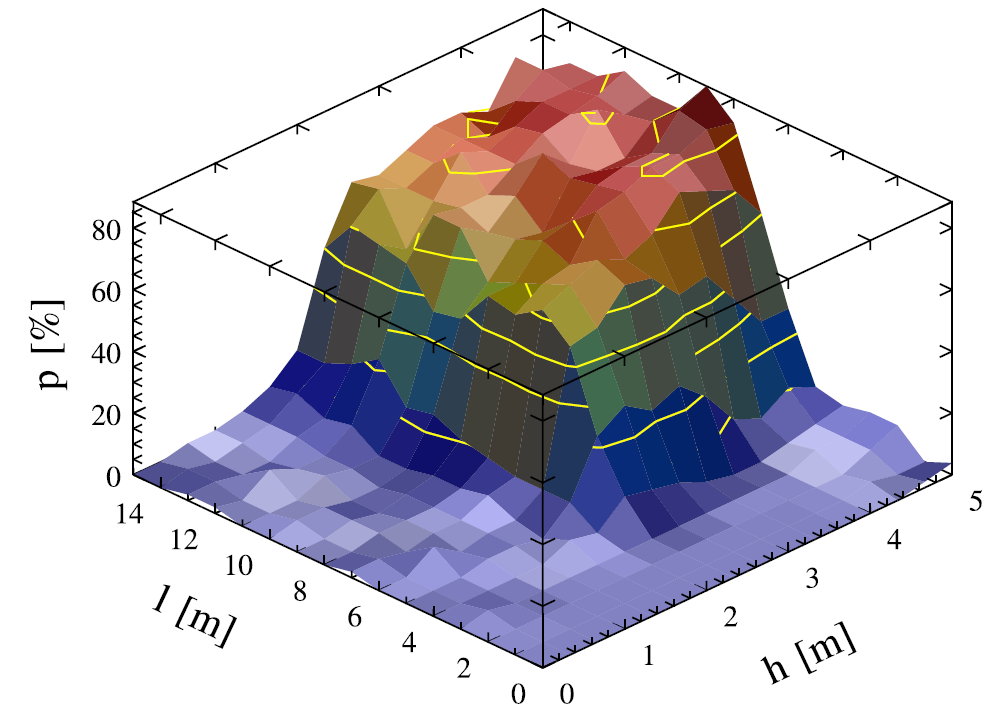
Models in FhSim are continuously validated against experimental data through projects employing FhSim as a tool. This ensures realistic model responses.
Speed and performance
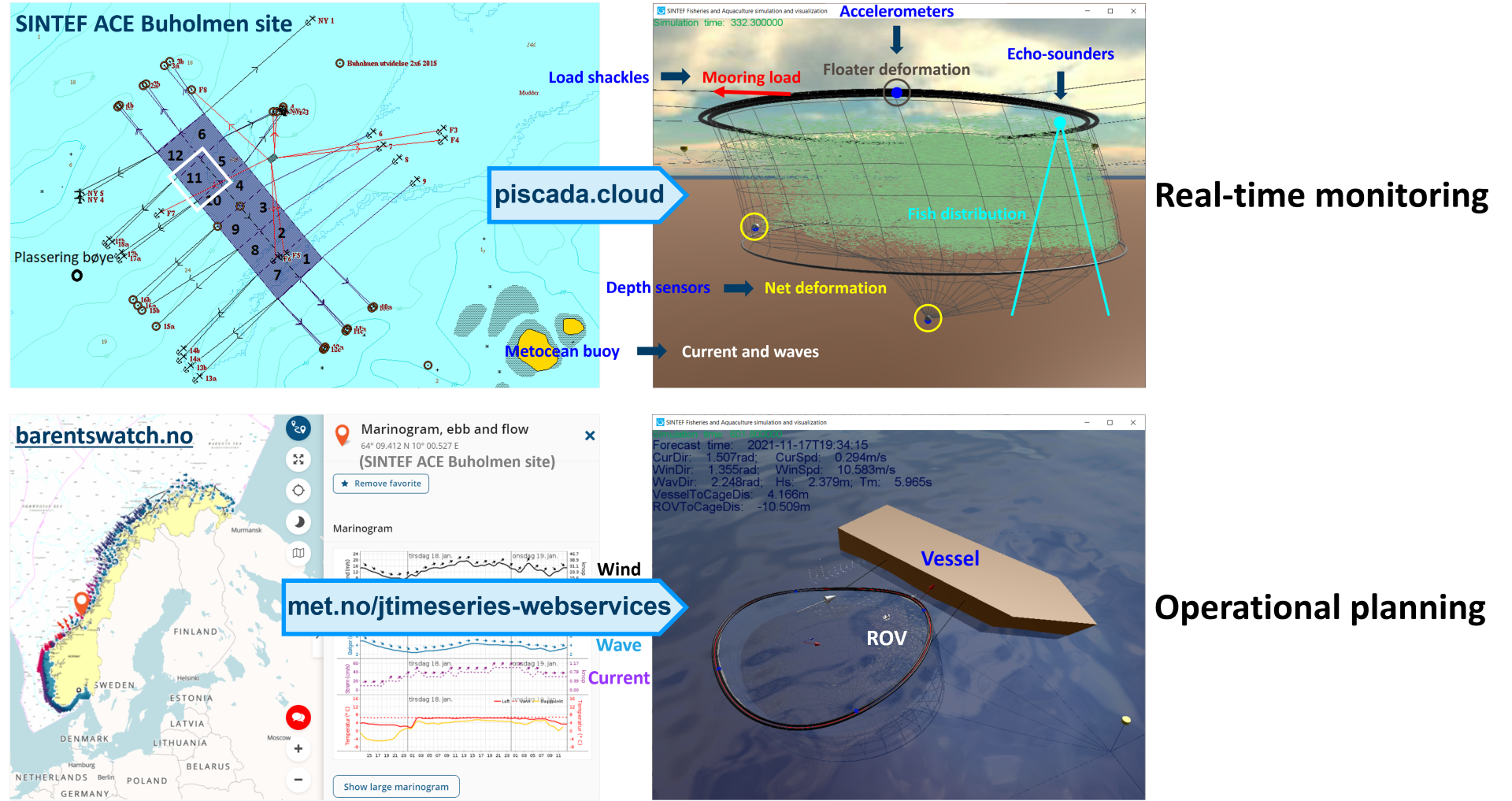
FhSim is developed with performance and real-time applications in mind. FhSim is used for applications where performance is paramount, such as monitoring (state estimation), control systems (MPC), operational decision support and personnel training in virtual environments.
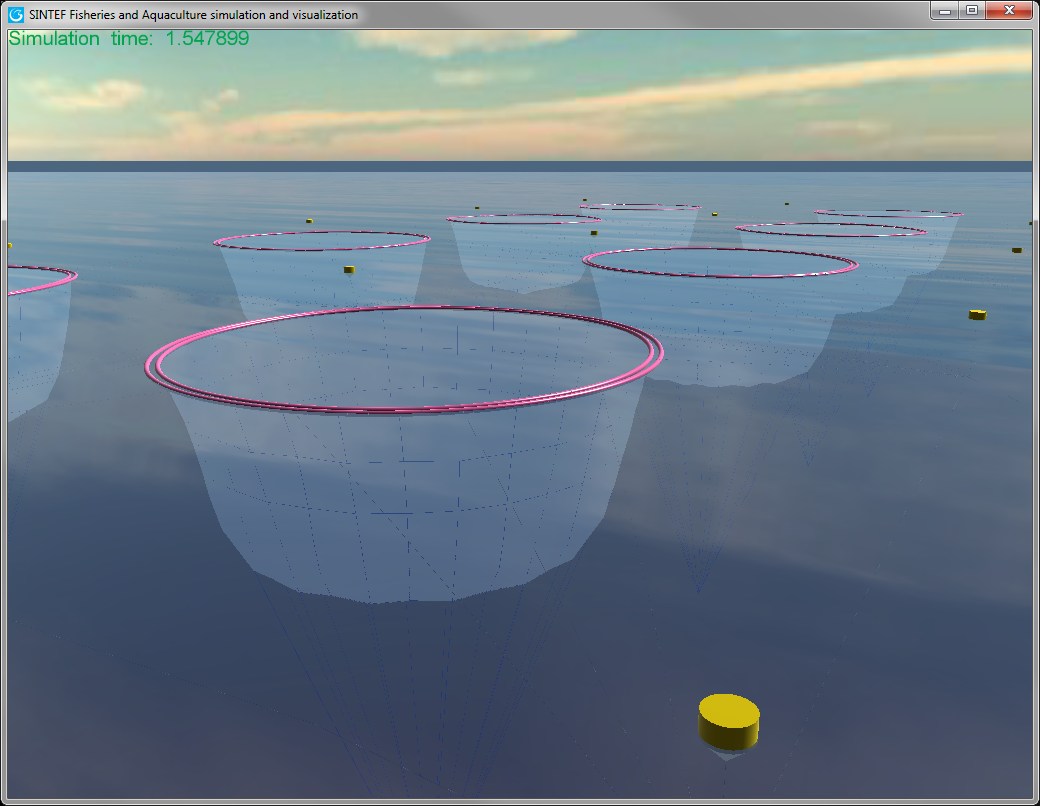
3D Visualization
FhSim features 3D visualization for development, demos, and presentation of results. Alternatively, it can also be run without visualization for maximum efficiency, e.g. when connected to external visualization engines.
Previous use cases
Components
Executables
Model libraries
Co-simulation support
API
Expected available: July 2025
Source code
Expected available: To be determined

Support & Team
Meet the team behind FhSim in SINTEF Ocean.

Stian Skjong
Energy systems, co-simulation, state estimation and control

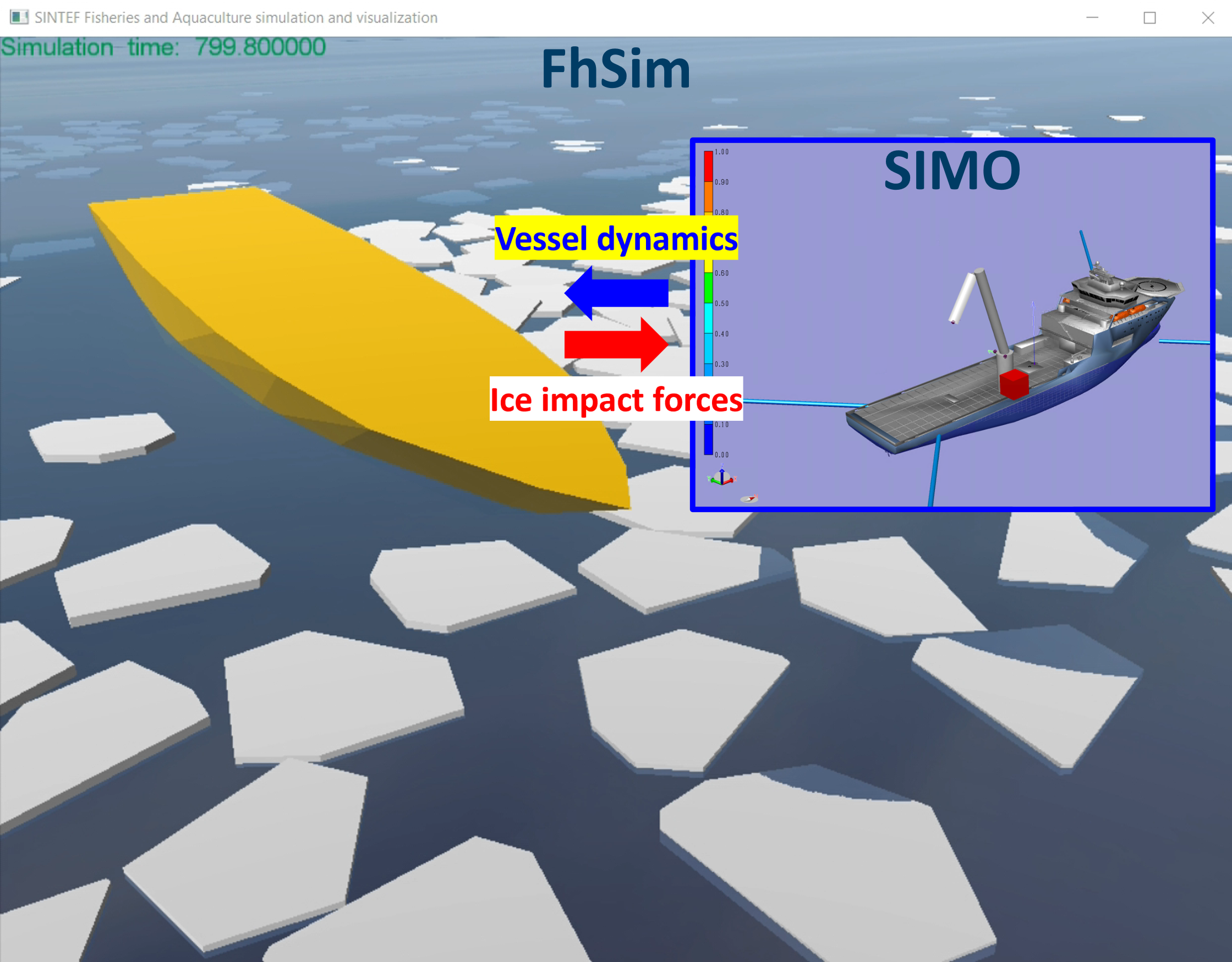
Biao Su
Marine aquaculture systems, ice-structure interactions

Karl-Johan Reite
FhSim core, net structures, trawl

Joakim Haugen
FhSim core, net structures, trawl

Andrei Tsarau
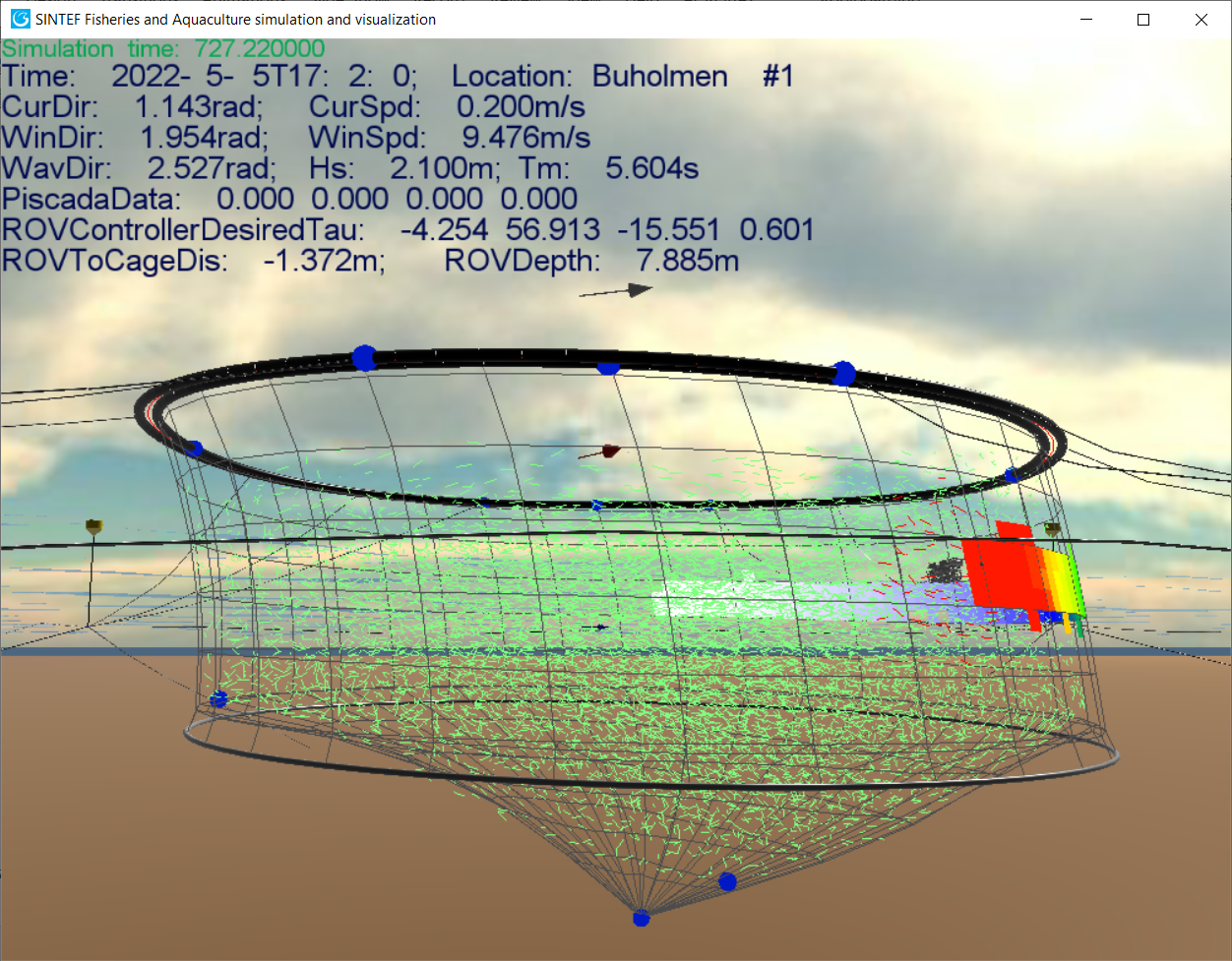
Hydrodynamics, sea loads, closed containment systems and net cages

Herman Biørn Amundsen
FhSim build system, FhSim core, net cages
Do you have any questions? Do you need support? Are you wondering how FhSim can be used in your project to help you reach your goals? Don't hesitate to contact us today!